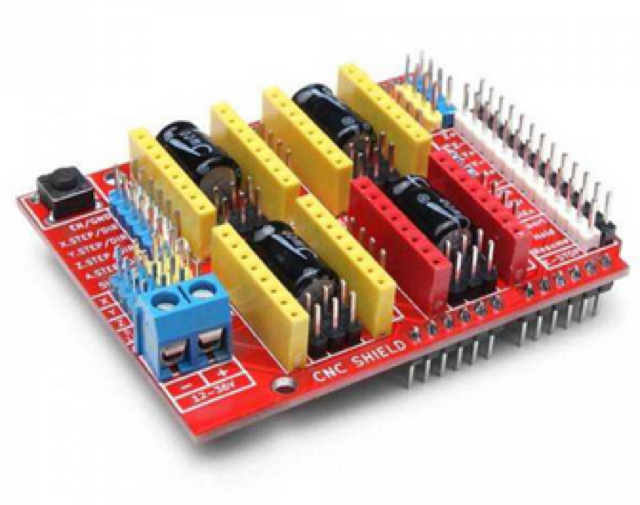
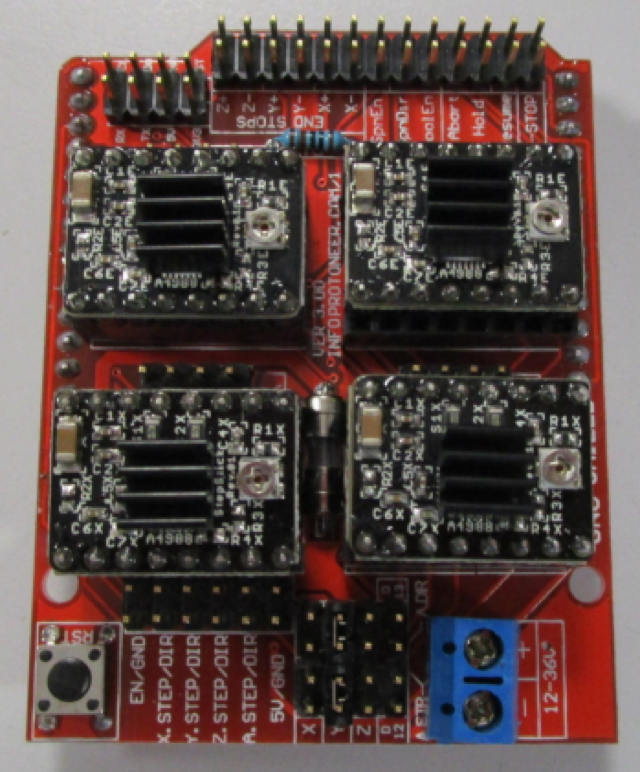
Le CNC-Shield monté et ses cavaliers de configuration.
OMM340-p137-153-Image 02
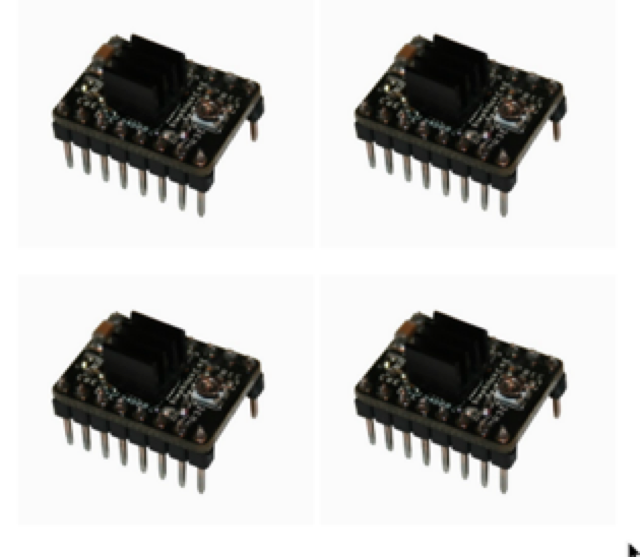
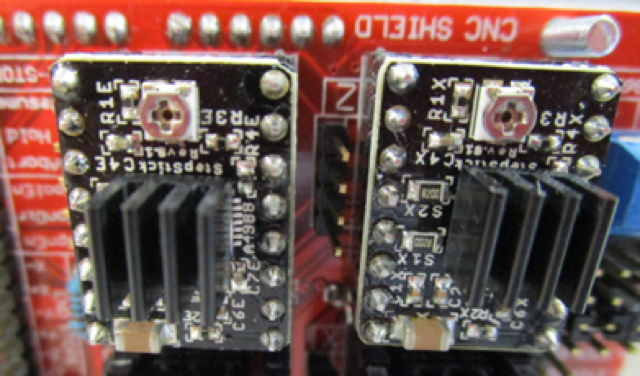
Drivers de moteurs pas-à-pas A4988 en mode « micropas »
OMM 342
3 x Capteur "fin de course" avec câbles

OMM340-p137-153-Image 04
1 x alimentation 12V - 300W et ses câbles

OMM340-p137-153-Image 03
Il manquait les cavaliers dans mon kit. Il en faut 15.
Pour comprendre la suite, l'essentiel à savoir est que :
• chaque moteur pas à pas est contrôlé par un étage dédié, appelé A4988 qui s'occupe de gérer les pas d'un moteur pas à pas bipolaire,
• chaque étage de contrôle d'un moteur pas à pas reçoit 2 broches de contrôle en provenance de l'Arduino
◦ une broche de sens (ou DIR)
◦ une broche de vitesse (ou STEP)
• chaque étage moteur gère les pas automatiquement, et supporte plusieurs modes de démultiplication du nombre de pas, appelés micropas les étages moteurs utilisés peuvent être configuré en 1/1, 1/2, 1/4, 1/8, 1/16... Autrement dit en 1/16, un moteur de 200 pas devient un moteur de 3200 micropas !! La configuration va se faire à l'aide de 3 broches de l'étage moteur qui seront mises au +5V ou au 0V à l'aide de cavaliers.
Si vous souhaitez approfondir l'utilisation de ce shield ou des étages de contrôle des moteurs pas à pas, vous pouvez vous reporter aux tutos Arduino dédiés, notamment :
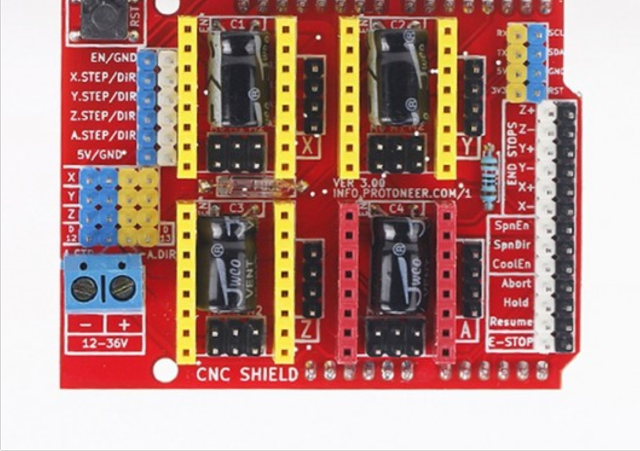
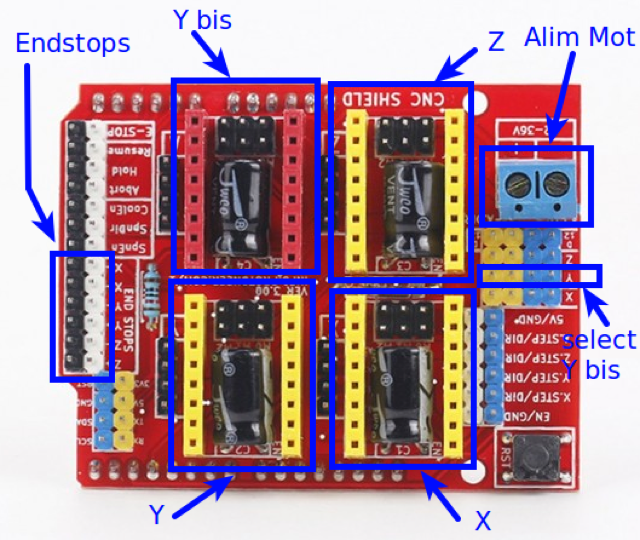
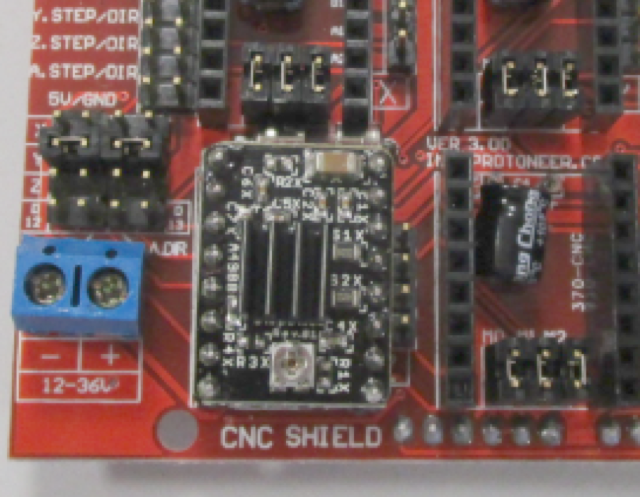
Avant tout, prendre le temps de découvrir et de comprendre le CNC-shield
OMM340-p137-153-Image 05
site officiel arduino-cnc-shield
Bien repérer notamment :
• l'emplacement de chaque étage moteur X, Y et Z et le 4ème étage que nous utiliserons ici pour dédoubler l'axe Y
• le bornier d'alimentation externe des moteurs
• les connecteurs droits des capteurs fins de course ou endstops (pour chaque axe, on a une position + et une position -, seule l'une d'entre-elle étant utilisée dans notre cas)
• les connecteurs droits de sélection du 4ème étage moteur en Y dédoublé (c'est-à-dire que les 2 moteurs Y recevront exactement le même signal de contrôle au même moment)
OMM340-p137-153-Image 06
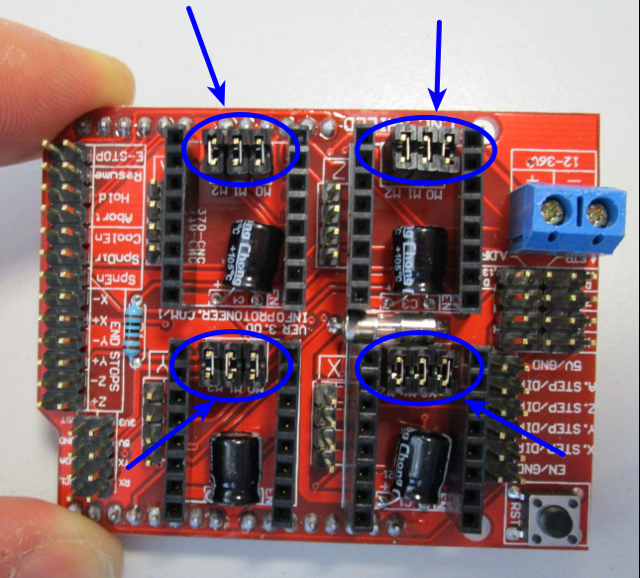
XXV.3.1 - Mise en place des cavaliers de configuration
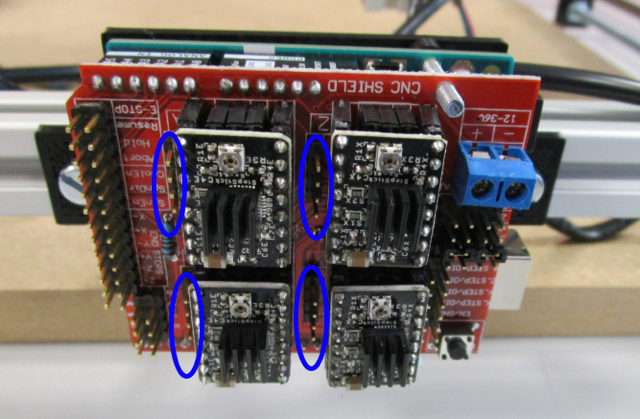
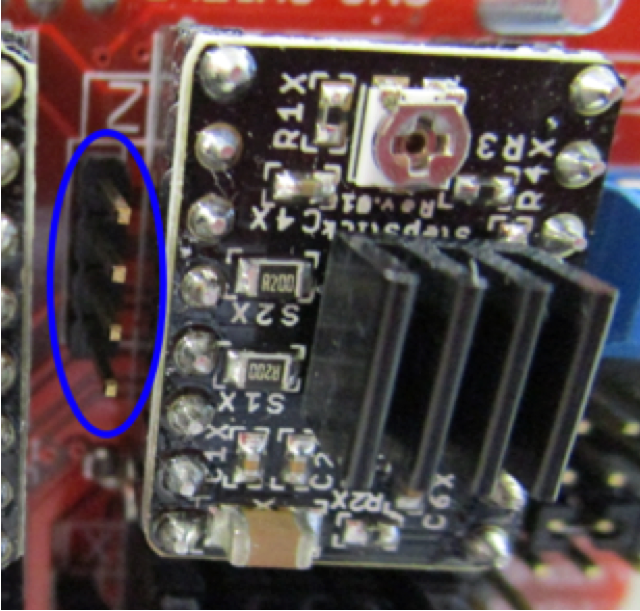
La première chose à faire est de mettre en place les cavaliers de configuration du mode micro-pas 1/16 pour tous les étages moteurs (connecteurs droits M0, M1 et M2 placés dans chaque support d'étage moteur)
Ces cavaliers étaient absents dans mon kit.
OMM340-p137-153-Image 07
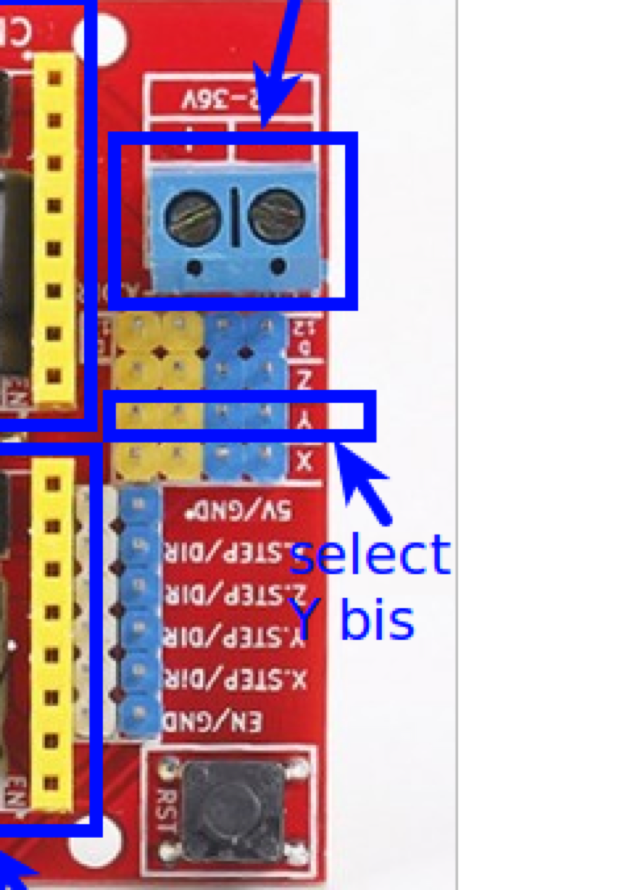
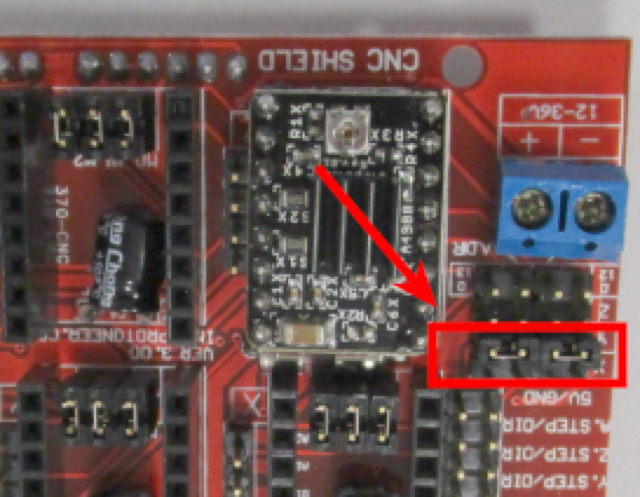
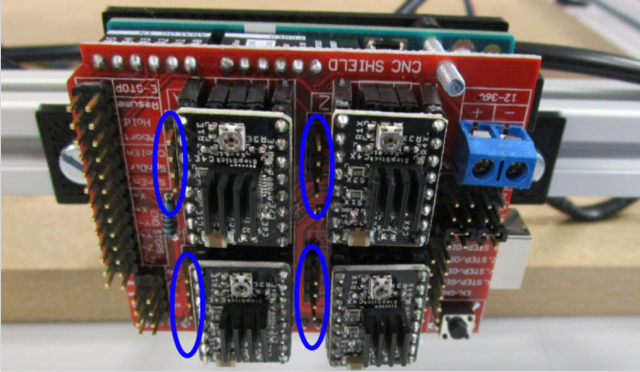
Il faut également mettre en place les cavaliers de dédoublement du signal de commande de l'axe Y sur le 4ème étage moteur.
OMM340-p137-153-Image 11
Cette photo ne correspond pas à celle du dessus.
OMM340-p137-153-Image 09
XXV.3.2 - Mise en place les drivers de moteurs
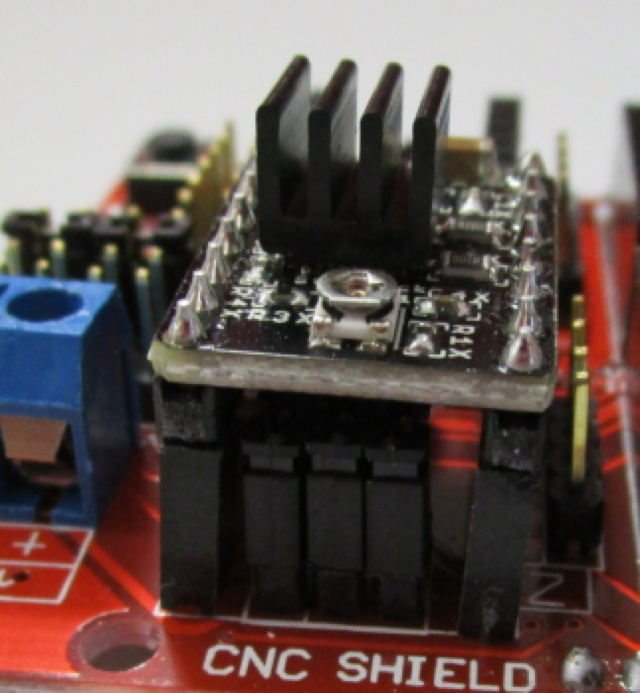
Mettre en place les drivers de moteurs en veillant à la bonne orientation et, c'est TRES IMPORTANT, qu'aucun étage moteur n'aie de broches « dans le vide » (autrement dit soit mal enfiché sur son support ). Tenir l'étage moteur par les bords et surtout pas par le radiateur qui se décollera à coup sûr…
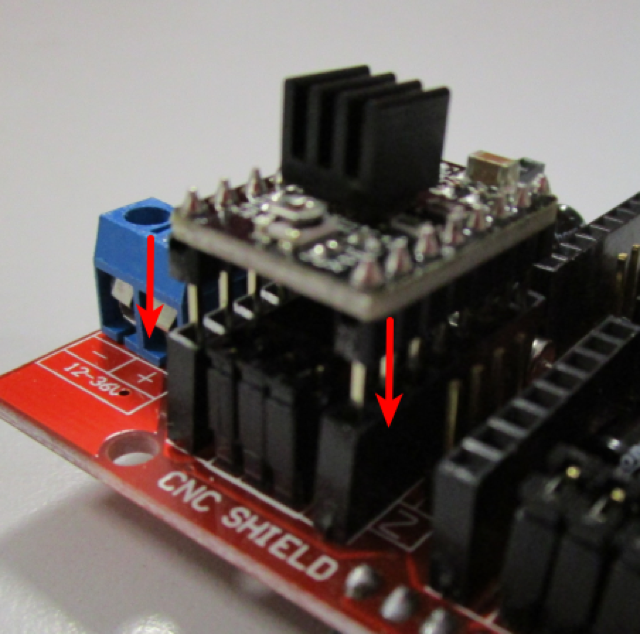
OMM340-p137-153-Image 10
OMM340-p137-153-Image 08
OMM340-p137-153-Image 12
Procéder de la même façon pour les 4 étages moteurs
OMM340-p137-153-Image 13
OMM340-p137-153-Image 15
Enficher le CNC-shield ainsi préparé sur la carte Arduino précédemment fixée
OMM340-p137-153-Image 14
XXV.3.3 - Câblage des moteurs pas à pas
Etape 3 Câblage des moteurs pas à pas
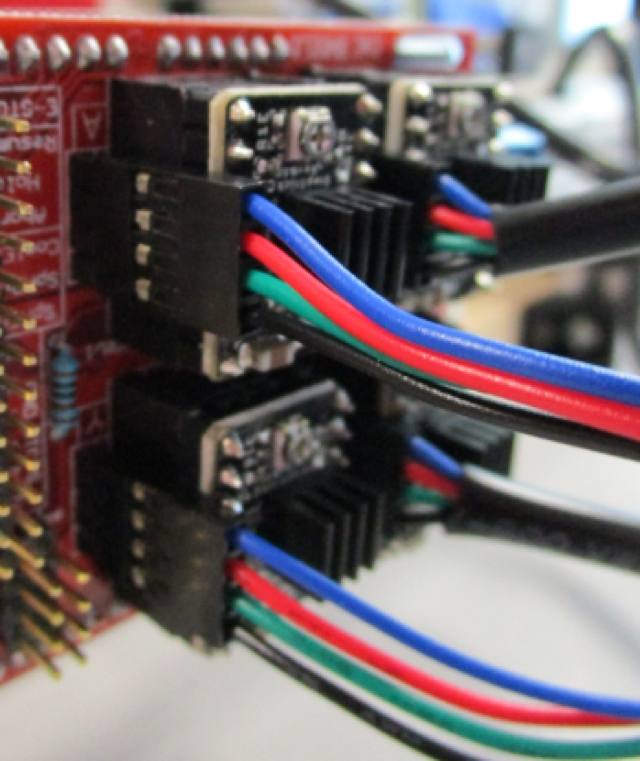
À présent, on peut câbler les différents moteurs sur le CNC-shield à côté de chaque étage moteur se trouve un bornier droit à 4 broches sur lequel on vient enficher directement le moteur voulu.
OMM340-p137-153-Image 14
OMM340-p137-153-Image 16
Concernant, le sens de connexion, simplement prendre une option de câblage (=tous les fils couleurs branchés de la même façon pour tous les moteurs) et utiliser la même pour tous les moteurs. Il sera possible dans un second temps de corriger les inversions de sens de rotation des moteurs comme nous le verrons.
Tout d'abord connecter le moteur des X.
Le câble bleu en haut. Comme sur la photo, c’est le bon câblage.
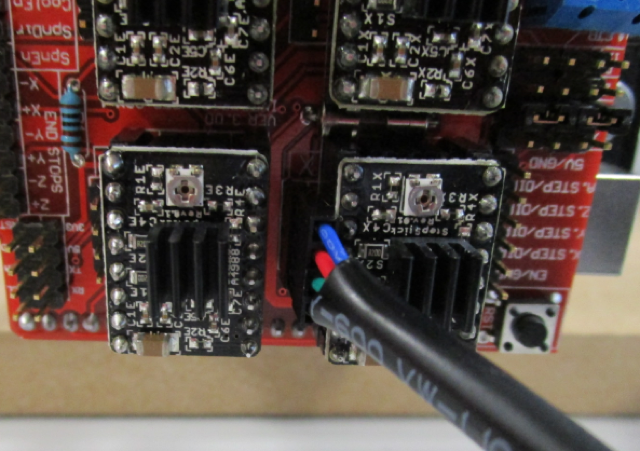
OMM340-p137-153-Image 17
puis connecter le moteur des Z
Toujours le câble bleu en haut.
OMM340-p137-153-Image 18
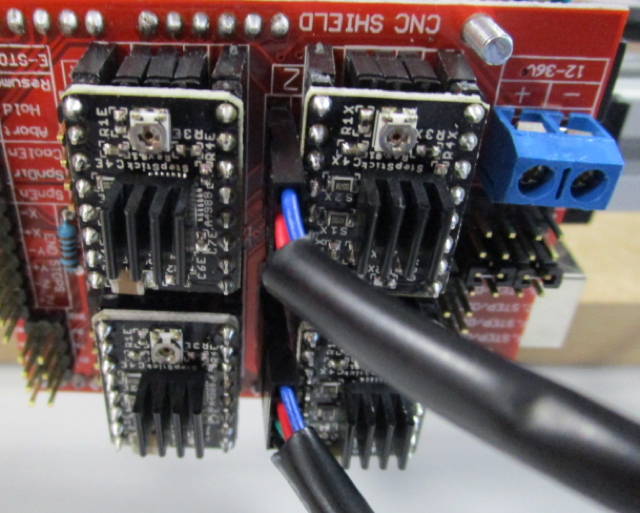
et enfin les 2 moteurs des Y
Et on redit tous en coeur, « toujours le câble bleu en haut ».
OMM340-p137-153-Image 20
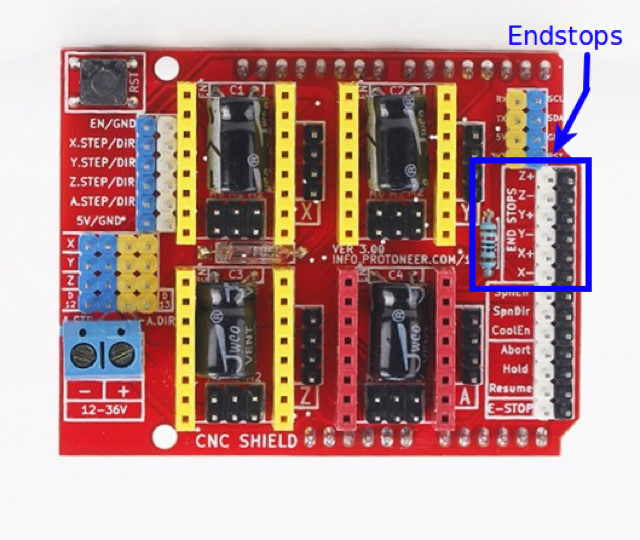
XXV.3.4 - Connexion des capteurs de fin de course
Connexion des capteurs de fin de course des axes X et Y sur le CNC-schield
Le CNC-shield dispose de connecteur pour les capteurs de fin de course à 2 broches, avec 2 positions possibles pour chaque axe position minimum (ou -) et position maximum (ou +)
OMM340-p137-153-Image 19
Dans notre cas, nous n'utiliserons que les capteurs de position « zéro », donc les positions (-) sur le CNC shield. Logiquement, nous allons donc connecter :
• le capteur de fin de course Y sur le bornier Y-
• le capteur de fin de course X sur le bornier X-
On connecte donc le câble du capteur de l'axe Y sur Y- (en laissant le rouge « dans le vide »)
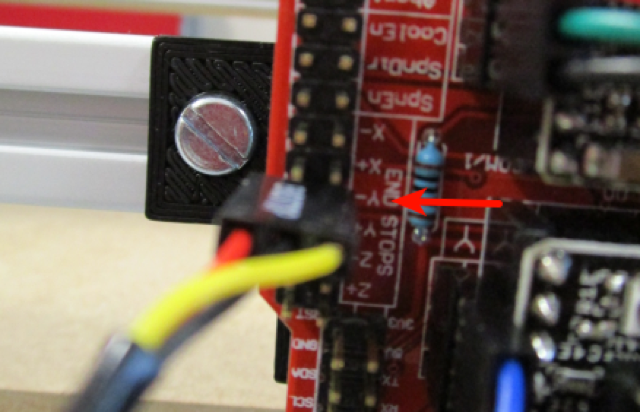
OMM340-p137-153-Image 22
Puis le câble du capteur de l'axe X sur X- (en laissant le rouge « dans le vide »)
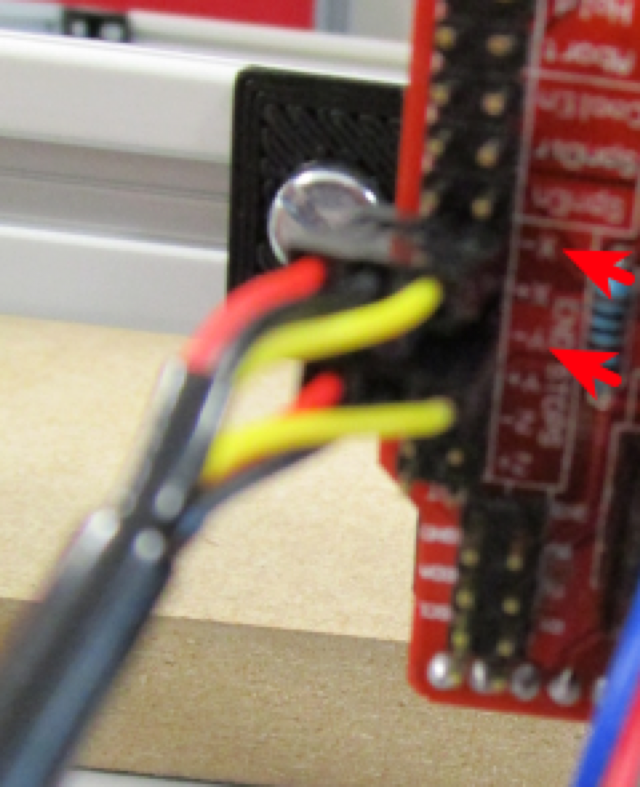
OMM340-p137-153-Image 21.png
Dans les 2 cas, laisser la broche « rouge » du câble non connectée, car nous ne l'utiliserons pas ici.
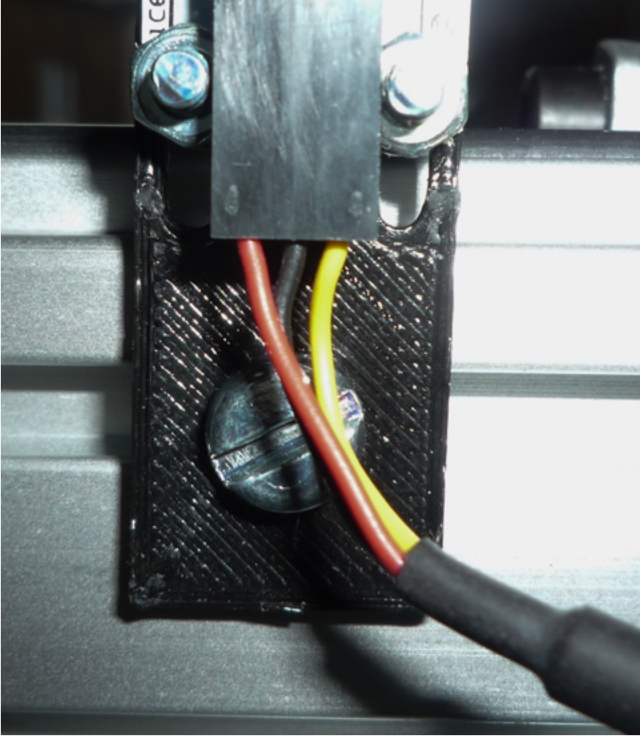
Et à l’autre bout, je connecte dans quel sens ?
XXV.3.5 - Connexion à l’autre bout du côté des endstop
J’ai mis dans ce sens-là, le rouge à gauche, et c’était bon. Ce serait mieux en le disant dans la documentation officielle.
Et le capteur de fin de course de l'axe Z ?
L'axe Z est un cas à part puisque le zéro est recalé à chaque fois selon la surface à travailler, le changement d'outil, etc. et le plus simple est de le faire en manuel.
Donc, par défaut, pas de capteur de fin de course du Z utilisé. Ceci étant, vous en disposez d'un dans le kit et libre à vous de l'installer si vous le souhaitez. Par exemple, sur le max de l'axe Z pour éviter de trop remonter l'outil par erreur.
En pratique, il est même plus utile de « créer » un capteur de fin de course par contact électrique entre une surface métallique et l'outil par exemple.
XXV.3.6 - Connexion de l'alimentation principale
Connexion de l'alimentation principale L'alimentation est livrée avec ses câbles
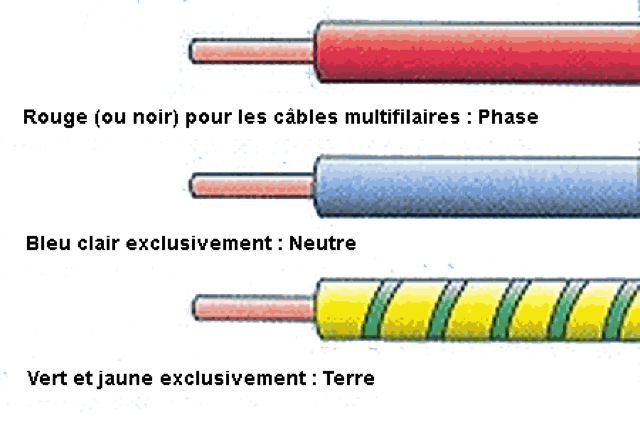
• un câble 3 brins 220V avec prise de terre
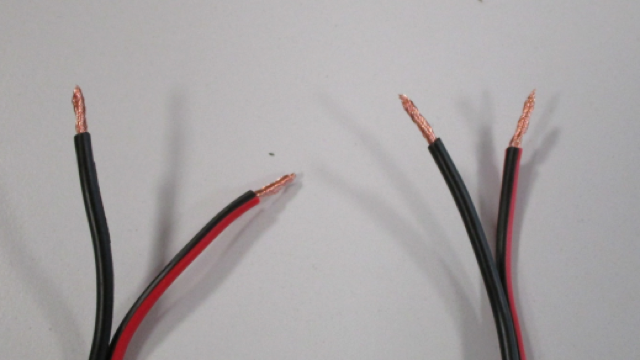
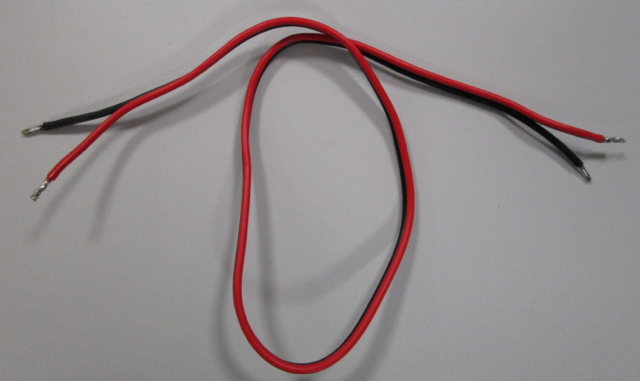
• 1 câbles 2 brins 12V
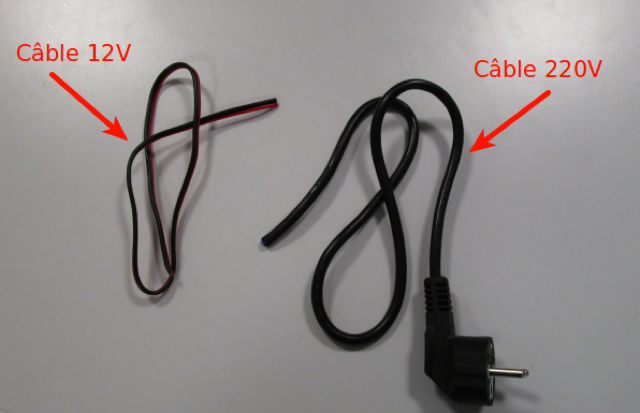
OMM340-p137-153-Image 23
ATTENTION
NE PAS CONNECTER LE CÂBLE 220V SUR LE SECTEUR
TANT QUE LE CÂBLAGE N'EST PAS TERMINÉ !
L'alimentation dispose d'un bornier à vis sur lequel vont être connectés les différents câbles. La disposition du bornier peut varier d'un modèle à l'autre d'alimentation, mais voici le plan type d'un tel bornier d'alimentation :
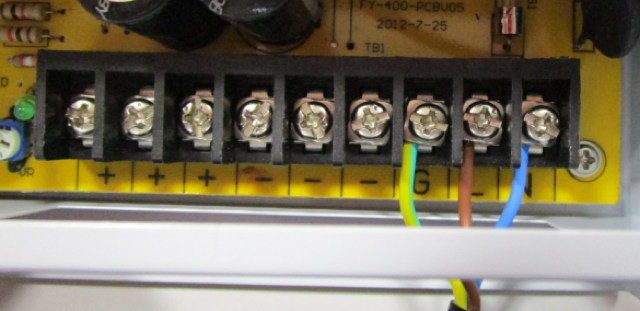
OMM340-p137-153-Image 26
Commencer par préparer le câble 220V en dénudant chaque câble sur 1cm et en les étamant à l'étain à l'aide d'un fer à souder (pas obligatoire, mais fortement conseillé)
OMM340-p137-153-Image 28
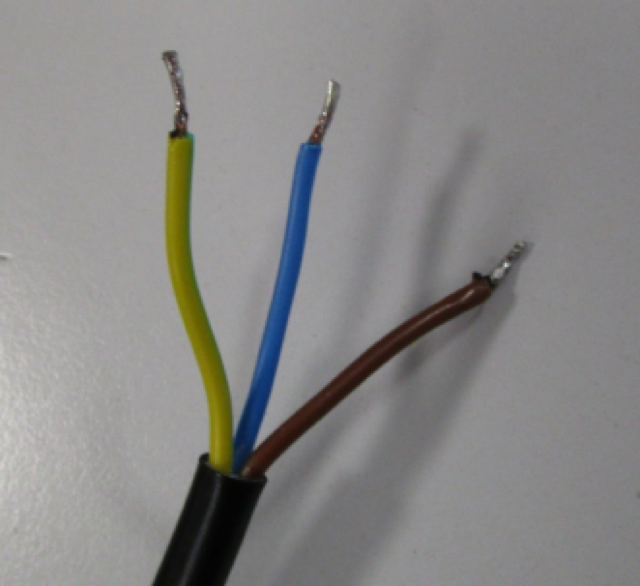
OMM340-p137-153-Image 24
Puis procéder de la même façon aux extrémités des 2 brins du câble 12V
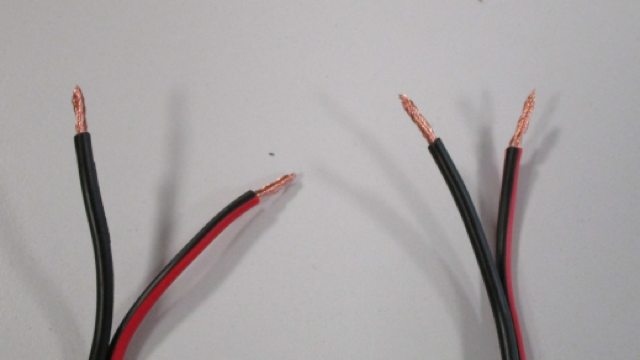
OMM340-p137-153-Image 28
OMM340-p137-153-Image 27
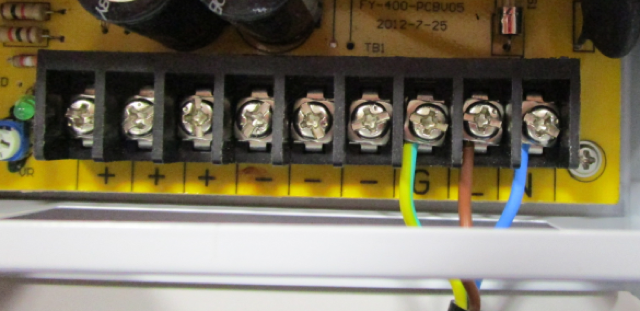
Ensuite, câbler le câble 220V en respectant le câblage suivant
• la terre au bornier G
• le neutre au bornier N
• la phase au bornier L
OMM340-p137-153-Image 30
OMM340-p137-153-Image 26
Connecter une extrémité du câble 12V à 2 brins sur l'alimentation en veillant à connecter le (+) sur le câble rouge et le (-) sur le câble noir

OMM340-p137-153-Image 29
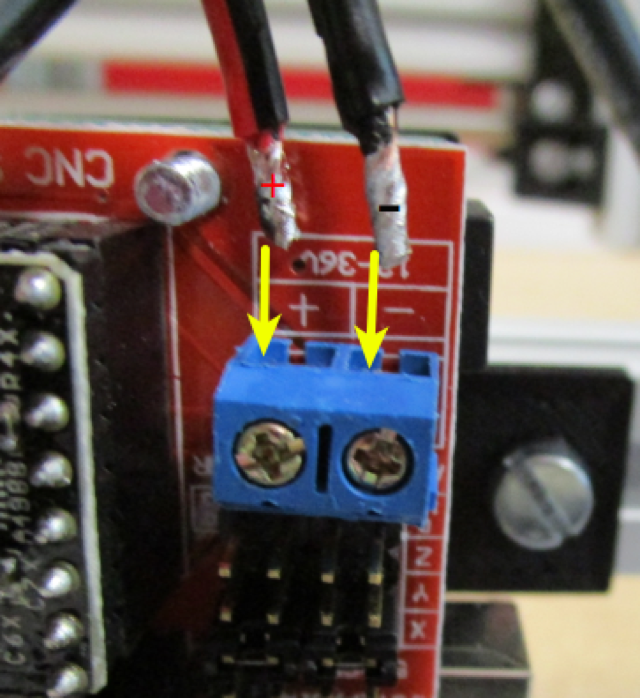
Connecter l'autre extrémité du câble 12V à 2 brins sur le bornier CNC-shield bien dévisser les vis du bornier pour pouvoir engager les câbles étamés.
POINT ESSENTIEL : NE PAS INVERSER LA POLARITÉ DE L'ALIMENTATION SUR LE BORNIER DU CNC-SHIELD, sinon le fusible du shield grillera instantanément lors de la mise sous tension.
OMM340-p137-153-Image 32
TRUC Pour chacun des câbles connectés sur bornier à vis, une fois la vis vissée à fond, tirer sur le câble pour s'assurer qu'il est bien engagé et tenu par la vis.
Voilà, vous y êtes
Le câblage MECANIQUE et ELECTRIQUE de l'Open Maker Machine PLUS est terminé.
Bravo ! Vous allez enfin pouvoir passer à l'action.
La suite se trouve dans le document « Prise en main de l’Open Maker Machine PLUS »